Implement the Robot class and define enum linked to a robot object: e_state and side. More...
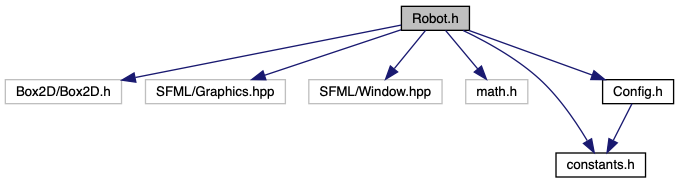
#include "Box2D/Box2D.h"#include "SFML/Graphics.hpp"#include "SFML/Window.hpp"#include <math.h>#include "constants.h"#include "Config.h"
Include dependency graph for Robot.h:
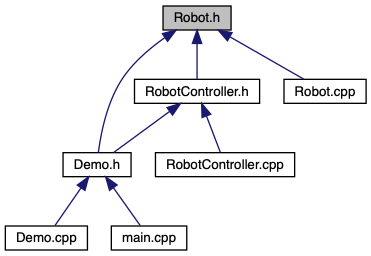
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | Robot |
Enumerations | |
| enum | e_state { WALK, BRIDGE } |
| enum | side { RIGHT, LEFT } |
Detailed Description
Implement the Robot class and define enum linked to a robot object: e_state and side.
The methods implemented in this class are relative to a single robot behavior: from movement to grip creation.
- Date
- 26 sept. 2018
Definition in file Robot.h.
Enumeration Type Documentation
◆ e_state
| enum e_state |
